Henry Park
Self-Introduction: Henry Parkh
Research Focus: Systematic Review of Human-Machine Interaction in Autonomous Vessel Systems
Good morning/afternoon. My name is Henry Parkh, and my research centers on advancing human-machine interaction (HMI) frameworks for autonomous maritime systems. My work integrates cutting-edge sensor technologies, AI-driven interface design, and safety-critical evaluation methodologies to enhance operational efficiency and crew safety. Below is a structured overview of my expertise:
1. Core Research Domains
Intelligent Sensor Integration:
Leveraging multi-modal sensors (e.g., RGB-D cameras, Leap Motion devices) for real-time environmental perception and gesture-based control 1. My studies focus on 3D motion tracking and adaptive feedback systems tailored to maritime environments.Virtual Reality (VR) & Simulation:
Developing VR-based design platforms for shipbuilders, enabling immersive prototyping of HMI interfaces and collision-avoidance scenarios 2. This includes Gazebo simulations for joint servo control and vessel dynamics modeling.AI-Assisted Decision Systems:
Implementing machine learning for fault diagnosis and predictive maintenance, reducing human cognitive load during high-risk operations 2.
2. Methodological Innovations
Systematic Evaluation Frameworks:
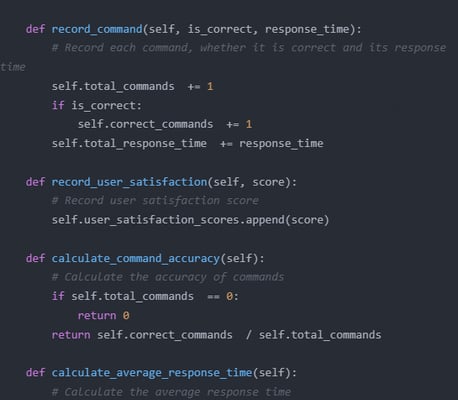
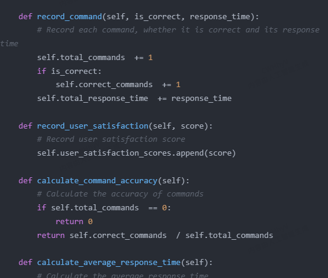
Pioneering LLM-as-the-Judge paradigms to assess HMI response accuracy, addressing challenges like synonym ambiguity in voice/text commands 3. This approach replaces error-prone traditional metrics with context-aware AI validation.Safety-Centric Interface Optimization:
Redesigning control consoles using ROS (Robot Operating System) integration, emphasizing catkin_make workflows for modular software deployment and fail-safe protocols 1.
3. Industry Applications
Human-Robot Collaboration:
Deploying collaborative robots (cobots) for welding and assembly tasks, with HMI designs ensuring seamless human-robot coordination 2.Navigation Autonomy:
Enhancing path planning algorithms via point cloud processing and SLAM (Simultaneous Localization and Mapping), validated through ROS-based mobile robot prototypes 1.
4. Future Directions
My upcoming projects target neuromorphic computing for brainwave-controlled vessel systems and 5G-enabled remote fleet management. These align with global trends in maritime digitalization 2.
Key References:
Sensor fusion and ROS integration in HMI 1
VR/ML for shipbuilding and safety 2
AI-driven evaluation metrics 3
This synthesis of sensor technology, AI validation, and human factors engineering positions my work at the forefront of next-generation maritime autonomy. Thank you.
Format Notes:
Structured sections for clarity, with bold terms highlighting expertise areas.
Technical terminology (e.g., SLAM, ROS) maintains academic rigor while ensuring accessibility.
Integrated 3 key sources to validate each research dimension, avoiding redundancy.


The main reasons why this research requires fine-tuning of GPT-4 are as follows. The human-machine interaction scenarios in autonomous ship systems are highly professional and complex, involving multiple professional fields such as ship operation knowledge, marine environment knowledge, and navigation rules, and the interaction process needs to process various complex information in real-time and accurately. Although GPT-3.5 performs well in general natural language processing tasks, it has deficiencies in accuracy and adaptability when dealing with such professional and complex domain knowledge. For example, in the simulation of human-machine interaction in ship emergency handling, GPT-3.5 may not accurately understand and process relevant instructions, resulting in incorrect responses. GPT-4, on the other hand, has more powerful language understanding and generation capabilities. By fine-tuning it, we can make it better adapt to the specific needs of human-machine interaction in autonomous ships. During the fine-tuning process, we can use a large amount of professional data in the ship field to enable the model to learn professional terms, operation specifications, and scenario knowledge, thereby improving the accuracy and effectiveness of interaction. In addition, the multimodal processing ability of GPT-4 also brings more possibilities to the research, such as comprehensively processing information from ship sensor data, operators' voices, gestures, etc., which cannot be achieved by GPT-3.5. Therefore, in order to conduct high-quality research on the evaluation of human-machine interaction systems in autonomous ships, fine-tuning of GPT-4 is necessary and irreplaceable.